




















El 14 de mayo, el barco Okeanos Explorer de la Administración Nacional Oceánica y Atmosférica (NOAA, por sus siglas en inglés) partió de Puerto Cañaveral en Florida en una expedición de dos semanas liderada por el programa Ocean Exploration de NOAA, con la demostración de tecnología de un vehículo submarino autónomo. Esta nueva clase de robot sumergible, llamado Orpheus, exhibe un sistema que lo ayuda a encontrar su camino e identificar características científicas interesantes en el lecho marino.
La navegación relativa al terreno fue fundamental para ayudar al rover Perseverance de Mars 2020 de la NASA a aterrizar con precisión en el planeta rojo el 18 de febrero. Mientras el robot descendía hacia la superficie, el sistema le permitió trazar un mapa visual del paisaje marciano, identificar peligros y luego elegir un lugar seguro para aterrizar sin ayuda humana. De manera similar, el helicóptero marciano Ingenuity de la agencia utiliza un sistema de navegación basado en visión para rastrear las características de la superficie en el suelo durante el vuelo, con el fin de calcular sus movimientos a través de la superficie marciana.
Desarrollada por ingenieros del Laboratorio de Propulsión a Chorro de la NASA (JPL) en el sur de California, una evolución de la navegación basada en la visión que se ha utilizado en Marte ahora se está sometiendo a prueba un poco más cerca de casa: frente a la costa este de Estados Unidos, en el océano Atlántico.
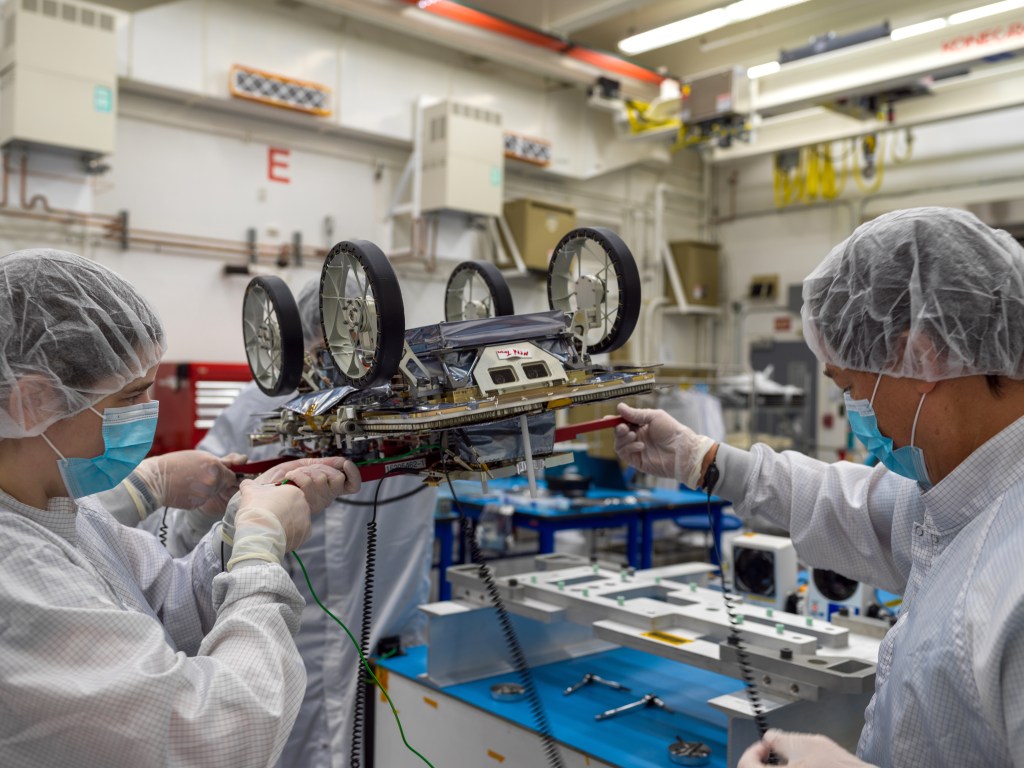
Normalmente se necesitaría un equipo de localización de gran tamaño y alta potencia, como un sonar, para navegar por las aguas oscuras y, a menudo turbias, cerca del lecho marino. Al utilizar un sistema de cámaras y luces de bajo consumo, junto con un software avanzado, Orpheus es un orden de magnitud más ligero que la mayoría de los sumergibles de aguas profundas. Más pequeño que un cuatriciclo y con un peso de aproximadamente 250 kilogramos (550 libras), Orpheus está diseñado para ser ágil, resistente y fácil de operar mientras explora profundidades inaccesibles para la mayoría de los vehículos.

Diseñado por la Institución Oceanográfica Woods Hole (WHOI, por sus siglas en inglés) en colaboración con JPL, Orpheus puede trabajar suelto en casi cualquier lugar del océano, incluidas las profundidades más extremas. En última instancia, el equipo del proyecto espera ver un enjambre de estos robots submarinos trabajar en equipo para construir mapas en 3D de las vastas regiones de fondo oceánico inexplorado en la zona abisal, regiones de más de 6.000 metros (20.000 pies) de profundidad. Pero antes de que el robot pueda explorar estas profundidades, primero debe ponerse a prueba en aguas menos profundas.
Buceando hacia el futuro
"Esta demostración técnica se utilizará para recopilar datos para demostrar la viabilidad de la navegación relativa al terreno en el océano y, al mismo tiempo, mostrar cómo varios robots operarán juntos en ambientes extremos", dijo Russell Smith, ingeniero mecánico de robótica en JPL. "Estas pruebas nos encaminarán para iniciar futuras inmersiones en la zona abisal y buscar de forma inteligente regiones emocionantes de alta actividad biológica".
La versión de Orpheus de navegación basada en visión se llama odometría visual e inercial, o xVIO, y funciona mediante el uso de un sistema de cámaras avanzadas y software de coincidencia de patrones junto con instrumentos que pueden medir con precisión su orientación y movimiento. A medida que Orpheus viaja por el fondo marino, xVIO identifica características debajo del vehículo, como rocas, conchas marinas y corales. De la misma forma en que recordamos puntos de referencia durante un viaje por carretera, xVIO construirá mapas en 3D utilizando estas funciones como puntos de referencia para ayudarlo a navegar. Pero este sistema es más que un simple medio para evitar que el robot sumergible se pierda.
Los mapas de alta resolución que crea xVIO se almacenan en la memoria para que cuando Orpheus regrese al área, reconozca la distribución única de las características y las use como punto de partida para expandir su exploración. Y cuando trabaje con compañeros robots, los mapas se pueden compartir, hacer referencias cruzadas y desarrollar para identificar rápidamente áreas de interés científico.

“En el futuro, algunos de los ambientes oceánicos más extremos estarán a nuestro alcance. Desde fosas oceánicas profundas hasta fuentes hidrotermales, hay muchos destinos nuevos que exploraremos ”, dijo Andy Klesh, ingeniero de sistemas también en JPL. "Al mantenernos pequeños, hemos creado una herramienta nueva y simplificada para los científicos que estudian los océanos, una que beneficia directamente a la NASA como un sistema analógico para la exploración espacial autónoma".
Pero Klesh señaló otra virtud de la colaboración entre la NASA y organizaciones como WHOI y NOAA, con su amplia experiencia oceanográfica: las tecnologías que se están desarrollando para explorar los océanos de la Tierra con vehículos submarinos autónomos inteligentes, pequeños y resistentes, podrían finalmente aprovecharse para explorar los océanos en otros mundos.
Los análogos de la Tierra se utilizan a menudo como sustitutos ambientales para otras ubicaciones en el sistema solar. Por ejemplo, Europa, la luna de Júpiter, posee un océano subterráneo que podría albergar condiciones favorables para la vida.
"En las profundidades abisales de la Tierra, las presiones son aproximadamente equivalentes a las del fondo del océano subterráneo de Europa, que se cree que tiene unos 80 kilómetros [50 millas] de profundidad", dijo Tim Shank, biólogo que dirige el programa HADEX (Exploración Hadal) de WHOI. “Es algo profundo pensar que esta expedición podría ser el trampolín hacia nuevos descubrimientos sobre nuestro propio planeta, incluida la respuesta a la pregunta más fundamental: ¿la vida es exclusiva de la Tierra o hay otros lugares más allá de este punto azul pálido donde la vida podría haber surgido? Pero antes de que podamos explorar Europa o cualquier otro mundo oceánico, primero tenemos que comprender mejor nuestro propio hogar".
Laboratorio de Propulsión a Chorro de la NASA, Pasadena, California